ReliaSolve worked with a university laboratory to help them complete the final stretch of their proof-of-concept deliverable for a contract, a combined digital and quantitative PCR device for measuring 8 samples at a time. This involved extending existing algorithms and working with project staff to integrate with their current code base. Ninety-one issues were resolved […]
Author: russ
OpenXR-OpenGL Example app
The hello_xr sample program from the OpenXR-SDK-Source repository includes frameworks and classes to handle building on multiple architectures (including Android) and on multiple rendering systems (OpenGL, GLES, Direct3D, Vulkan). This makes it really good for showing which parts of OpenXR are common and which are distinct across platforms. I wanted a sample application that was […]
MolProbity++
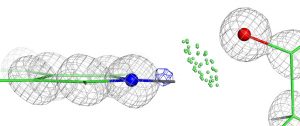
ReliaSolve is working with the Dave and Jane Richardson laboratory as part of a supplemental NIH award to upgrade their MolProbity system. MolProbity’s protein model validation has a huge user base consisting of most of the structural biologists worldwide, is a part of most model-building and refinement software systems, and is central to model validation […]
COVID Face Shield Assembly Scheduling
ReliaSolve worked with the “Be A Maker” (BeAM) team at the University of North Carolina at Chapel Hill to provide face shields for UNC hospitals as their stock of commercially-available solutions has become depleted. We are providing a custom sorting and scheduling program that ranks the hundreds of potential volunteer responses into least-likely to be […]
Cross-platform Qt:OpenGL(ES) example
This project has an example OpenGL/GLES based program that has been tested on Windows 10 Pro, Ubuntu 18.04.03, macOS 10.15.1, the iPhone simulator 11.3.1 and Android 10. It can serve as a starting point to build other cross-platform applications. It includes constructing appropriate headers for vertex and shader programs to work with either OpenGL or […]
Hourglass API example library
The Hourglass API repository contains the interface definition and example programs to implement an example “hourglass” interface. This type of interface has C++ at the lower layer, a thin C dynamic library interface in the middle through which all things pass, and another C++ interface at the upper layer. This approach enables both the library […]
Vality: VR system integration

ReliaSolve worked with Vality to help integrate its vGlass head-mounted display into OSVR and through OSVR into Unity and SteamVR. This included incorporating model-based distortion correction, writing custom tracker drivers, integrating the tracking and display subsystems, and optimizing performance for the high-resolution displays by supporting direct-mode rendering, predictive tracking, and time warping.
Here’s To Talking
The point: I’d like your help to spread an important and timely society-healing message by sharing or performing one of two songs. This is the conservative song of the pair. You can listen to the song on Spotify or other streaming services (search for ReliaSolve) or preview a copy by clicking on the image or […]
More Than Just You And Me

The point: I’d like your help to spread an important and timely society-healing message by sharing or performing one of two songs. This is the liberal song of the pair. You can listen to the song on Spotify or other streaming services (search for ReliaSolve) or preview a copy by clicking on the image or […]
Redbud Labs: Process development and quality control

ReliaSolve co-founded and continues to work with Redbud Labs to develop components and processes for microrheometry and blood-based diagnostic systems. Work involves developing hardware/software solutions for process development and quality control for magnetically-actuated post microarrays. This involves image analysis, synchronized device control and imaging, and GPU algorithm acceleration.